Image courtesy of the researchers
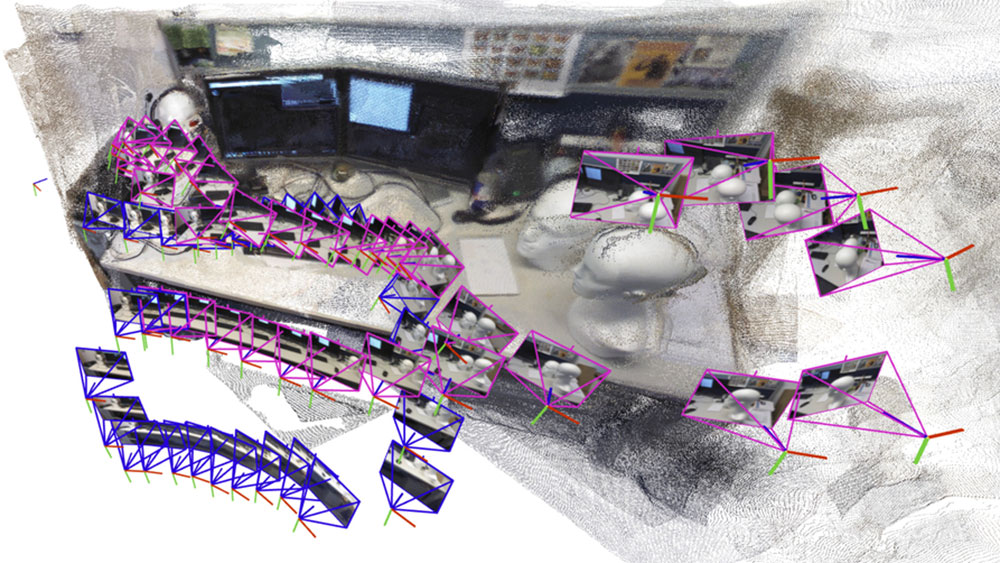
The artificial intelligence-driven system incrementally creates and aligns smaller submaps of the scene that it stitches together to reconstruct a full 3D map (like this office cubicle) while estimating the robot’s position in real time.
Social Sharing block
A robot searching for workers trapped in a partially collapsed mine shaft must rapidly generate a map of the scene and identify its location within that scene as it navigates the treacherous terrain.
|
ADVERTISEMENT |
Researchers have recently started building powerful machine-learning models to perform this complex task using only images from the robot’s onboard cameras. But even the best models can only process a few images at a time. In a real-world disaster where every second counts, a search-and-rescue robot would need to quickly traverse large areas and process thousands of images to complete its mission.
To overcome this problem, MIT researchers drew on ideas from both recent artificial-intelligence vision models and classical computer vision to develop a new system that can process an arbitrary number of images. Their system accurately generates 3D maps of complicated scenes like a crowded office corridor in a matter of seconds.
The AI-driven system incrementally creates and aligns smaller submaps of the scene that it stitches together to reconstruct a full 3D map while estimating the robot’s position in real time.
…
Add new comment