Grasp Lab / UPENN
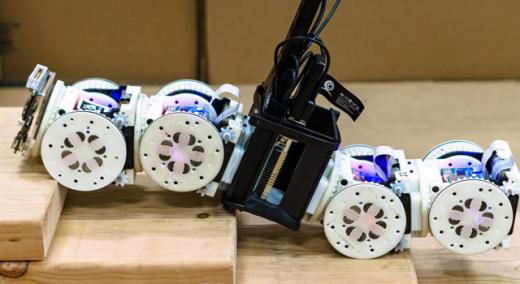
A SMORES-EP robot takes a snake-like form to climb stairs. The SMORES-EP (Self-Assembling Modular Robots for Extreme Shapeshifting) is made up of individual cubes that can self-assemble into different shapes to complete various tasks.
Social Sharing block
For most of us, the word “robot” conjures something like C-3PO—a humanoid creature programmed to interact with flesh-and-blood people in a more or less human way. But the roster of real-world robots is considerably more varied. The list includes Boston Dynamics’ dog-inspired robots, Dalek-like security bots, industrial arms on an assembly line, and any number of flying insect-inspired robots. If a machine is designed to do a complicated task in an automated fashion, it’s a robot.
|
ADVERTISEMENT |
A robot, it turns out, doesn’t even need to have a fixed shape. That’s the vision of researchers who work in modular reconfigurable robotics (MRR) and are pursuing bots that can assemble themselves, by rearranging similar or identical parts into whatever shape suits the task at hand. These robots can take the form of snakes, lattices, trusses, and more, and can be set to any challenge—providing construction support, doing repair work, or scouring for survivors after a natural disaster.
…
Add new comment