Social Sharing block
Superconducting (SC) magnetic and SC radiofrequency (SRF) devices designed for use in particle accelerators present challenging alignment problems. These devices are assembled and aligned at room temperature but operate at 2 Kelvin (K) to 4 Kelvin (K), with thermal offsets being large relative to the desired alignment tolerances. Unique solutions have been developed for controlling and minimizing the thermal shift, including utilization of materials that expand under cooling to compensate for contraction and kinematic couplings. Measurement of the thermal shift within SC devices is performed using both optical telescope and laser instruments, typically through a parallel plate vacuum glass window. This article presents techniques developed at Argonne National Laboratory for measuring, controlling, and minimizing thermal shift in SC devices at both the Advanced Photon Source (APS) and the Argonne Tandem Linear Accelerator System (ATLAS).
|
ADVERTISEMENT |
Background
Argonne National Laboratory has pioneered the development of particle accelerator technology for more than 50 years. Today, Argonne’s two main facilities with SC devices in use are the APS, a synchrotron light source; and ATLAS, the world’s first SC accelerator for heavy ions. In addition to supporting these facilities, Argonne also supports SC accelerator technology development for other labs. The devices include SC magnetic undulators (SCUs) developed at the APS and SRF accelerating structures developed at ATLAS.
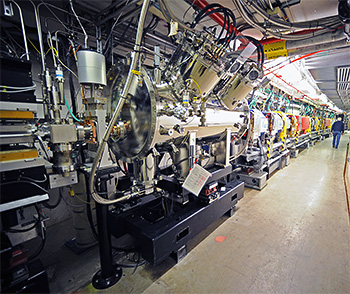
Superconductivity enables the design of compact, highly efficient SC magnetic and SRF devices capable of generating higher magnetic and electric fields within a smaller volume while consuming less energy than is possible with normal conducting devices. Savings of both energy and material are realized in SC devices, even with costs of refrigeration and exotic materials factored in. Colossal accelerators like the Large Hadron Collider (LHC) at CERN would be nearly impossible to build and operate without SC technology.
Superconductivity is a phenomenon whereby certain materials, when cooled below a critical temperature, lose all resistance to direct electrical current flow and expel trapped magnetic fields. It was discovered in 1911 by Dutch physicist Heike Kamerlingh Onnes, who was also the first person to liquefy helium.1 Cryogenic temperatures of 2 to 4 K (–456° F to –452° F), which is the temperature of liquid helium (LHe), are required for SC accelerator devices to operate. Cryostats (or cryomodules in SRF systems) are super-insulated vacuum vessels that contain SC devices. Copper thermal radiation shields and multi-layer insulation (MLI) line the walls of a cryostat. Cutaway sections of a SCU cryostat and a SRF cryomodule can be seen in figures 1 and 2, respectively.
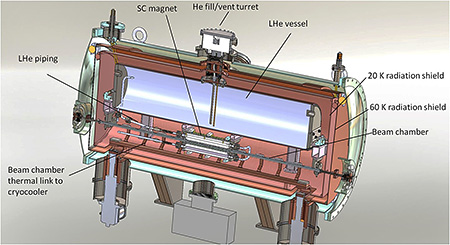
Figure 1. Cutaway section of a SCU cryostat
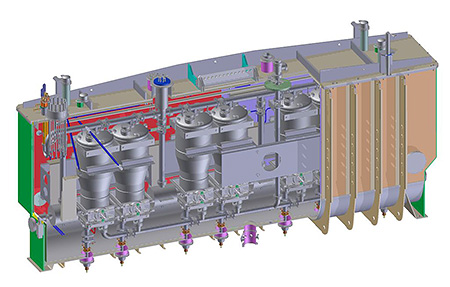
Figure 2. Cutaway section of a SRF cryomodule
When cooled to cryogenic temperatures, the cold mass assembly in a SC device experiences a volumetric change that shifts its position within the cryostat. Alignment corrections for thermal shift are calculated based on the coefficients of thermal expansion for the materials in the assembly, and are applied during warm alignment. The shift, due to forces introduced by the static differential vacuum pressure, is also compensated. Components are offset-aligned in warm conditions so that they shift into their ideal position when the device is cooled. Calculations are typically very close to the actual shift observed; however, small corrections are usually applied after cool-down. Techniques utilized at Argonne for measuring, controlling, and minimizing thermal shift, as well as new methods under development, will be explained in the following sections.
SC device metrology
Several different types of instrumentation are used for the internal measurement and alignment of SC devices. Traditional optical telescopes, wire position monitors (WPMs), and lasers have all been successfully employed. Portable 3D coordinate measurement instruments, such as laser trackers and articulating arms, are used extensively during warm alignment of SC devices, when the cold-mass components are accessible. Once a cryostat is closed, access for measurement is limited to vacuum viewports and alternative methods are needed. Telescopes and open-wire or other optical targets are preferred over WPMs because the optical method provides comparable accuracy at a much lower cost. Laser displacement sensors (LDSs) have also been successfully used to measure thermal shift in SC devices. A novel 2D laser scanning system that employs LDSs to acquire 3D thermal shift information is currently under development at Argonne.
Optical instruments
Optical instruments used for measurement of internal SC device components include optical levels and alignment telescopes. In SCUs, only the vertical shift (Y), pitch, and roll are measured, while with SRF devices measurements of both the horizontal and vertical (X and Y) directions as well as pitch, roll, and yaw are made.
Internal cryostat measurements for SCUs are short-range, less than 1 m, and the targets are ~100 mm apart. Instruments are set up in the same position and elevation for repeatability. The first SCU developed at APS had no viewports; thermal shift was measured with an optical level by viewing spherical targets placed directly inside of the electron-beam vacuum chamber. Newer APS SCUs have side viewports and targets mounted on the vacuum chamber that allow accessibility for measurement throughout assembly, testing, and installation. Figure 3 shows an optical level set up to view internal cryostat targets in an SCU.
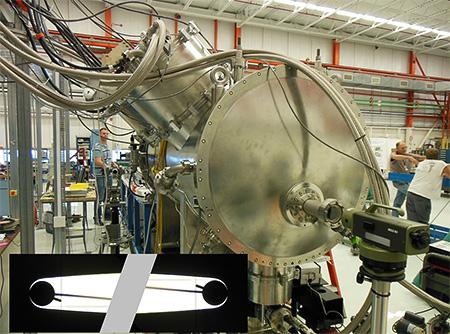
Figure 3. Optical level set up to view internal cryostat targets in a SCU; inset photo is of spherical beads in a prototype SCU vacuum chamber taken through the optical level eyepiece
Thermal shift measurements for SRF devices are far more difficult to accomplish than those for the SCUs, with multiple open-wire targets over a 5-m range. Open-wire targets are used because they may be placed along a common line of sight without introducing optical distortion. In the case of the ATLAS Intensity Upgrade (AIU), limited headroom after installation required the use of a periscope attachment on the alignment telescope, with the scope set up perpendicular to the reference line. Further details regarding optical measurement of SC devices will be discussed in the following SCU and SRF sections.
Although optical measurement of thermal shift in SC devices has proven to be a cost-effective method, in the future electronic measurement using lasers and automated data acquisition will play a key role in improving efficiency and accuracy in these types of measurements.
LDSs and WPMs
Alignment tolerances required for the next generation of accelerator systems are exceedingly stringent, particularly in SCUs for free electron lasers (FELs) and high-intensity SRF electron and ion accelerators. Under development is a new measurement system designed to ascertain thermal shift that adapts a 2D laser scanning technique developed in 2011 for RF electron gun repair.2
LDSs were utilized to measure thermal shift in the International Linear Collider (ILC) S1-global experiment performed at the High-Energy Accelerator Research Organization (KEK) in Japan. The LDS was set up to measure the vertical SRF cavity position within the cryomodule through a vacuum viewport. Results indicated that the LDS measurements were more reliable than those obtained using a WPM system.3 The LDS method offers advantages over a WPM system in that it is external, portable, and less costly. Usually, once the repeatability of the thermal shift over a few cycles has been established, there is no longer a need to measure it. A single LDS scanner can be used and re-used to measure multiple positions on multiple devices, whereas a WPM system remains within the cryostat forever.
The scanning technique is capable of ascertaining the relative change in 3D position of cold-mass components inside a cryostat. In the ILC S1-global experiment, the LDS measured only the vertical cavity position; however, with the scanning technique thousands of coordinate pairs may be measured, and the profile plots may be used to quantify change in component position in more than one dimension. A single precision scan across a unique artifact with distinct features will provide enough information to determine shift in vertical (Y) and horizontal (X, Z) position as well as roll. Two or more scans at known locations would provide enough information to ascertain thermal shift in six degrees of freedom (DOF).
A kinematic coupling interfaces the LDS scanner and the cryostat to provide repeatability when the scanner is moved for measurement at multiple locations. The LDS scanner is mounted on a standard vacuum flange ring with three V-grooves machined radially at 120° angular separation. The mating flange on the cryostat vessel has three precise holes to accept standard tooling balls. The scanner flange V-grooves rest on the cryostat flange tooling balls to create a Maxwell kinematic clamp.
Development of the 2D scanning instrument for internal cryostat measurements is underway.
Vacuum windows
Measurement of cold components within a cryostat or cryomodule requires a transparent medium between the cold vacuum space and ambient air, introducing a source of uncertainty. Precision measurement requires a higher level of quality than is available in off-the-shelf vacuum viewports with a typical parallelism specification of about 30 arc-minutes. Nonparallel surfaces on standard vacuum windows create an optical wedge that changes the angle of the line of sight as it passes through the window. Plano-parallel windows introduce only a parallel displacement of the line of sight that remains constant over distance.4 Optical micrometers used in optical tooling transits and precision levels rely on the same principle.
High-quality windows are used for precision measurement of cold components inside SC devices. The parallelism specification is <10 arc-seconds for targets at close range, <1 m, and <1 arc-second for measurement of multiple targets over a range of 1 m to 5 m. Small windows, <75 mm in diameter, are used to minimize deflection of the planar surfaces due to vacuum differential forces as well as to limit thermal radiation from heating the SC system. Measurements taken through the windows are secondary, used to detect relative shift under vacuum in warm and cold conditions. Internal targets are measured for absolute position before the windows are installed.
After a window is installed, optical or laser measurements are taken very close to normal incidence with the window surface to minimize refraction. In SCUs, refraction effects on the line of sight introduced by glass and vacuum are recorded and compensated. Thermal shift measurements in SRF devices reference lines of sight established using fixed targets located within the vacuum space. Two reference axes are established at room temperature and under vacuum using open-wire targets rigidly affixed behind the viewports, at each end of the cryomodule vessel. Fiducial targets attached to the SC components are measured in X and Y with respect to each reference axis. After the cryomodule is cooled to 2 K, the fiducial positions on each device are compared to the original measurements at room temperature. The thermal offset is the difference between these measurements. Notice that refraction effects are constant throughout the measurements.
Controlling thermal shift
Thermal shift control in SC devices includes the utilization of materials that expand under cooling to compensate for contraction, and kinematic couplings that deterministically control the motion. These techniques are evolving and improving based on lessons learned as new devices are built. The goal is to minimize or cancel out thermal shift altogether when possible, and to reduce uncertainty in corrections when they must be applied.
Superconducting undulators
Undulators are magnetic insertion devices (IDs) installed in synchrotron light sources and FELs that oscillate an electron beam with alternating, periodic magnetic fields to produce intense X-ray energy. Conventional IDs utilize rare-earth, permanent magnets. SCUs are electromagnetic IDs that employ windings of high-current SC wire to generate magnetic fields. Low-temperature SC wire is made from niobium 3-tin (Nb3Sn) and niobium-titanium (NbTi). Interest in SCUs is stimulated by the fact that the SCUs can reach higher fields for the same vacuum gap and period length than is possible with state-of the-art permanent magnet-based undulators.5
The first SCU (SCU0) built at Argonne was successfully installed at the APS in December 2013, and the second, SCU1, was installed in May 2015. In collaboration with Lawrence Berkeley National Lab (LBNL), a third SCU (LCLS-SCU) is currently being assembled to support research and development testing of new SC magnet technology for an upgrade of the Linac Coherent Light Source (LCLS) at the Stanford Linear Accelerator Center (SLAC).
Kevlar suspension
In the APS SCUs, the cold mass (as seen in figure 4) is suspended and constrained within the cryostat vessel by Kevlar bands. The bands are attached to the cryostat at adjustable hangers to facilitate alignment of the cold-mass assembly within the vessel. A three-point vertical alignment system uses two adjusters at one end of the vessel and a single adjuster at the other end that splits the load on two bands through a whiffletree pivot. Four additional bands constrain the cold mass in the horizontal direction. In SCU0 the bands were made using braided Kevlar spearfishing line tied with fisherman’s knots. Newer devices use improved bands composed of multiple winds of 25-lb tensile-strength Kevlar thread secured with epoxy. Kevlar has unique properties that make it useful in cryogenic systems, including low thermal conductance, high tensile strength without stretching and, remarkably, the ability to expand when cooled to cryogenic temperatures. It is important to note that Kevlar is significantly weakened by knots because the fibers abrade each other. Shock-loading of Kevlar should also be avoided.
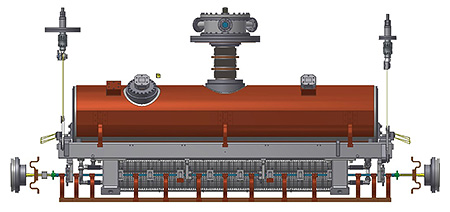
Figure 4. View of SCU cold mass assembly, including Kevlar suspension and vertical adjusters
SCU0
The thermal shift for SCU0 was measured using an optical level looking directly into the aperture of the beam chamber through glass viewports. Seven pairs of 3 mm-diameter spherical bead targets placed inside the chamber at set locations were spring-loaded with stiff wire to engage the racetrack profile in the horizontal plane, as seen in the figure 3 inset photo. By observing the sphere top and bottom tangents, the shift of the beam chamber was characterized over a thermal cycle. The thermal shift as well as the shift resulting from vacuum pressure differentials was measured and corrected. Initial warm measurements made under insulating vacuum indicated that the ambient pressure on the bellows connecting the LHe tank to the top of the cryostat had lowered the chamber by 0.30 mm, with approximately 0.1 mrad of pitch introduced. After the system was cooled down to 4 K, the beam chamber measured about 0.90 mm below the initial reference with a pitch of about 0.2 mrad, primarily as a result of Kevlar expansion. When SCU0 was warmed back up to room temperature, the vertical position was 0.35 mm below the reference with a 0.1 mrad pitch. The cryostat was then cycled up to atmosphere and back to insulating vacuum. After this cycle, the chamber was 0.25 mm below the starting reference with a pitch slightly greater than 0.1 mrad. The SCU alignment tolerances are shown in the table in figure 5.6,7
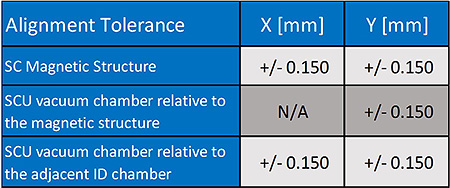
Figure 5. Table showing SCU alignment tolerances6
To control and minimize thermal shift of the cold-mass assembly, the Kevlar bands were shortened and aluminum links were added. Figure 6 shows the modified suspension system from both ends of the cryostat vessel. The length of the aluminum was calculated to compensate for the elongation of the Kevlar, the contraction of the cold mass, and the shift caused by pressure differential forces. Calculated values were verified during the next cycle, which takes about 190 hours (8 days) to complete. Measurements using the spherical beads could not be repeated, but monitoring was incorporated into the magnetic measurement procedure. Magnetic mapping of SCU0 involves stretching a titanium (Ti) tube through the beam chamber centerline. The Ti tube guides a carbon-fiber tube with a magnetic Hall probe and fiber-optic target at the end of it. The carbon-fiber tube is guided by a long translation stage mounted to a fixed measurement bench. The centerline used for the test is defined by the axis traced by the translation stage travel. A micro-alignment telescope with dual-axis micrometer was utilized to monitor the fiber-optic target traveling through the Ti tube. This method, although less accurate than the spherical beads, proved that the suspension system modified with the aluminum links maintained the vertical position of the beam chamber during the cooling process, practically negating thermal shift with less than 0.1 mm observed.7
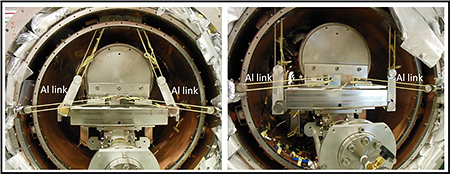
Figure 6. SCU0 Kevlar suspension system, including aluminum links for thermal shift compensation
SCU1
In the second SCU (SCU1), modifications were made to the measurement approach, including the addition of two vacuum viewports located on the side of the vessel and target tabs attached to either side of the beam vacuum chamber (as seen in figure 7), allowing access for measurement and adjustment throughout the assembly, testing, and installation. The spherical bead method was not used in SCU1. The improved multiple-wind Kevlar bands were used, but the Al links were not redesigned. Vertical thermal shift was measured after initial cool-down through the side viewports using an optical level, and a change of –0.35 mm upstream and –0.42 mm downstream was observed and corrected. After installation and cool-down in the APS storage ring, measurements of the vacuum chamber elevation indicated the upstream end was at –0.03 mm and the downstream end was at –0.14 mm with respect to the ideal position. As of this writing a third device, LCLS-SCU, is in the process of assembly, and the same measurement strategy employed in SCU1 will be utilized.
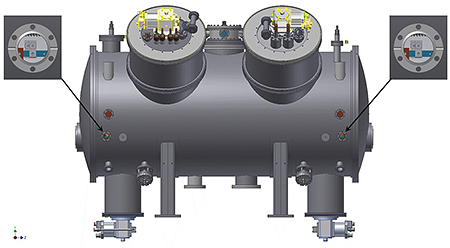
Figure 7. SCU1 cryostat vessel with side viewports added; insets show internal targets mounted to the beam vacuum chamber
SRF cryomodules
SRF technology is extraordinarily complex and relies on knowledge and expertise from across a wide range of scientific and engineering disciplines. Advanced SRF technology is making it possible to build high-power compact electron, proton, and ion linear accelerators for isotope production facilities, accelerator-driven systems for nuclear waste transmutation or power generation, and high-intensity proton accelerators for industrial and homeland security applications. For inertial fusion, SRF accelerators could compress and ignite fusion targets by ion beam bombardment and serve as efficient drivers for fusion reactors. High-power proton and ion beams are required for the development of new radiation resistant materials for future reactors. High-power accelerator beams can also drive the next generation reactors that burn non-fissile fuel, such as thorium.8
SRF-resonant cavities produced at ATLAS are constructed of formed, welded niobium and stainless steel. The niobium cavities are encased in stainless steel vessels and the annular space between the outside of the niobium cavity and the stainless steel jacket is filled with the liquid helium coolant for operation at 2 K to 4 K. When RF energy is applied to the cavity at the design frequency, the resonant fields can accelerate charged particles by a few million volts while dissipating only a few watts of RF power in the heating of the cavity walls.
SRF cryomodules present difficult challenges with regards to alignment. Multiple SRF cavities and SC solenoid magnets are individually aligned in kinematic couplings mounted on a large titanium strong-back rail structure that is suspended by titanium rods from the lid of the cryomodule vessel. The entire assembly is top-loaded into the vessel. Figure 8 shows a SRF cavity string in a strong-back assembly, and figure 9 shows a SRF cryomodule vessel.
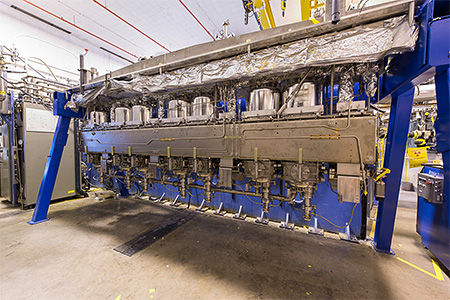
Figure 8. SRF cold mass assembly with strong-back, cavities, and solenoids suspended from the cryomodule lid
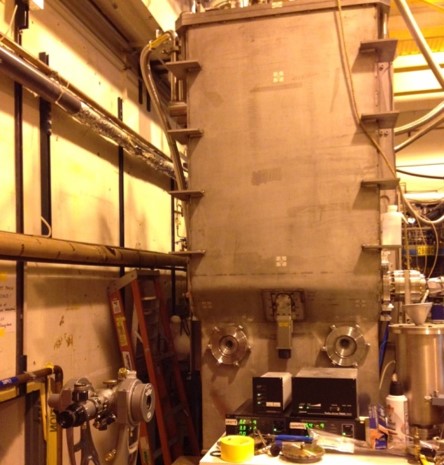
Figure 9. SRF cryomodule vessel showing vacuum viewports
Kinematic couplings
Kinematic couplings are deterministic, highly repeatable positioning systems that exactly constrain all six DOF without over-constraint. The most common type is the Kelvin clamp, consisting of three spheres resting in cone, V-groove, and flat elements. When engaged, the cone constrains three DOF, the V-groove two DOF, and the flat one DOF. In contrast, a Maxwell clamp consists of three spheres resting in three V-groove elements. When engaged, each V-groove constrains two DOF, equally distributing the constraints. For good stability in a Maxwell kinematic coupling, the normals to the planes containing the force contact vectors should bisect the angles between the spherical centers. Ideally the elements should be arranged equilaterally with 120° angular separation between the V-groove elements, although some designs may require an exception to this rule.9 Kinematic coupling geometry can be seen in figure 10.
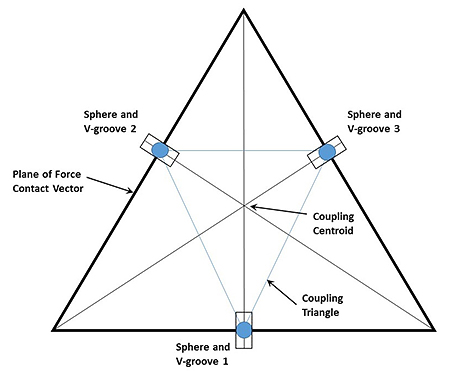
Figure 10. Kinematic coupling geometry; the normals to the planes containing the force contact vectors should bisect the angles between the spherical centers
Kinematic couplings are subject to Hertzian stresses at the contact points. As loads are increased, the spherical diameter must also increase, and proportions become impractical for loads exceeding several hundred pounds. The canoe sphere, invented by Alexander Slocum at the Massachusetts Institute of Technology, solves this dilemma.9 Canoe spheres are machined to grind two tiny segments of a very large (~1 m or ~40-in. diameter) sphere symmetrically onto a relatively small element. One of the smallest available is the miniature canoe sphere, machined on to a cylindrical element 1.125 in. in diameter. They are a revolutionary innovation, each capable of supporting tremendous loads of up to 5,000 lbs, and greatly expand the potential applications for kinematic couplings in science and industry. A canoe sphere and mating V-groove can be seen in figure 11.

Figure 11. Image of a canoe sphere and mating V-groove
The Maxwell clamp is useful in cryogenic conditions, as the center of the coupling triangle is thermally invariant, whereas in a Kelvin arrangement contraction is directed toward the fixed conical element. In SRF cryomodules, multiple kinematic couplings are employed, one set for each resonator or solenoid, to deterministically control the thermal shift. The AIU utilized Kelvin clamps with 1-in.-diameter spheres. The Fermilab Project X Injector Experiment (PXIE) cryomodule (now being built) will employ Maxwell clamps with canoe spheres for improved function.
ATLAS energy upgrade
The ATLAS Energy Upgrade (AEU) was commissioned in July 2009. The SRF components were hard-mounted to the strong-back structure in an over-constrained assembly. Upon cool-down, chaotic shift in both translation and rotation of components was observed. Components were initially aligned to ± 0.1 mm; however, as a result of thermal shift the final alignment quality decreased to random errors of ± 0.5 mm, with pitch and yaw errors of up to 0.5°. It was decided that subsequent cryomodule designs would eliminate over-constraint in the mounting system and employ kinematic couplings to better control and direct thermal shift.
ATLAS intensity upgrade
Kelvin-type kinematic hardware specified for the AIU cryomodule (as seen in figure 12) was an improvement to the over-constrained system in the AEU; however, problems were encountered during the warm alignment process. The SRF cavities are ultra-clean, and must remain under vacuum to prevent contamination. The vacuum forces worked against the alignment system, lifting the cavities out of their kinematic mounts. The pressure differential forces are cancelled when the assembly is under insulating vacuum inside the vessel, but it was necessary to pre-load the kinematic couplings with threaded rod connectors when aligned warm. Additionally, the couplings were slightly overloaded, with SRF cavities weighing nearly 400 lbs resting on three 1-in. diameter spheres, introducing potential problems due to Hertzian contact stresses. The Kelvin clamps specified for the AIU control thermal shift, but corrections were applied for both X and Y due to the arrangement. The cavities and solenoids were aligned to a common axis in warm conditions at an offset from the beam axis of –0.4 mm in X and –3.6 mm in Y. The offsets compensate for the calculated thermal contraction of the cold mass and shift of the titanium strong-back due to the deflection at the hanger attachment points on the cryomodule lid with the application of vacuum. Warm alignment was accomplished using a variety of metrology instruments, including optical tooling transits, optical levels, a laser tracker, and an articulating CMM.
During warm alignment, 22 open-wire target fiducials attached to the cavities and solenoids were located both optically and with the CMM arm by tracing the diameter with the probe. Figure 13 shows open-wire targets mounted on one side of the assembly. Open-wire targets were also mounted behind each vacuum viewport within the cryomodule vessel to provide a fixed reference line. The fixed targets were referenced to the cryomodule centerline. After the cavity string was loaded into the cryomodule box the target positions were measured through the viewport tubes without the glass windows in place. The open-wire targets were measured through the viewports on the cryomodule box before and after evacuation of the cryomodule and the subsequent cool down. At ambient temperature the solenoids showed a horizontal variation of 0.08 mm RMS and a vertical variation of 0.17 mm RMS with respect to the warm axis. The pitch and yaw of the solenoids were measured to be 0.03° RMS and 0.08° RMS, respectively. The room temperature alignment results of the cavities, for which four times looser tolerance than the solenoids are allowed, are 0.36 mm RMS in X, 0.21 mm RMS in Y, yaw of 0.07° RMS, and pitch of 0.15° RMS.10
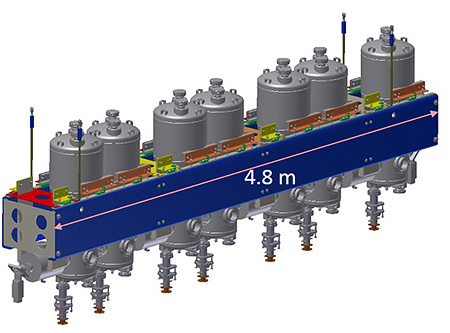
Figure 12. Seven SRF cavities and four SC solenoids mounted on the strong-back (blue) with their own kinematic-alignment hardware (orange for cavity and yellow for solenoid); four titanium suspension rods are hung from the cryomodule lid which is transparent in this model view

Figure 13. Open-wire optical targets mounted to SRF cavities and solenoids in the strong-back assembly
Measurements of the open-wire targets for vertical shift on evacuation of the cryomodule and the subsequent cool down showed the expected behavior. The average shift of the solenoid targets is 3.57 mm and it is in good agreement with the calculated shift of 3.60 mm, which is derived by thermal contraction of the cold mass and vertical shift of the lid due to vacuum pressure. Note that some cavities have two targets, but others have only one, whereas all solenoids have two targets, which is as many targets as is practical. For the devices which have two targets, average measured displacement was used. A yaw of 0.01° over the entire strongback is observed, and it is thought to be due to imperfect dimensions of the formed titanium sheets used in the strong-back. Nevertheless, this yaw could be compensated by adjusting the cryomodule vessel position to place the average horizontal shift of the solenoid centers at 0.38 mm, which is in good agreement with the calculation of 0.40 mm. The deviation is 0.09 mm RMS for the solenoids and 0.26 mm RMS for the cavities. The alignment errors induced at cool down are combined with the room temperature alignment errors for final alignment errors that are summarized in the table in figure 14.10
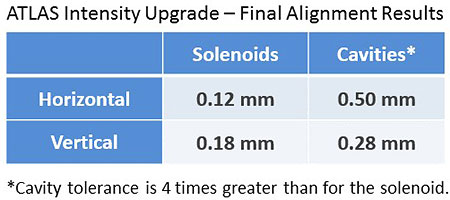
Figure 14. Table showing alignment results in cryomodule at 4.5 K (RMS deviations from the fitted beam axis)10
PXIE cryomodule
The PXIE cryomodule is the next SRF device being built at Argonne. Maxwell kinematic couplings utilizing canoe spheres will be the interface between the strong-back support and the SRF cavities and SC solenoids. This arrangement both permits and controls motion of the components in all three V-grooves as they contract toward the center of mass, minimizing or cancelling out thermal shift in the X direction. The canoe spheres will be affixed to the strong-back, and the V-grooves will be mounted in an inverted orientation on the cavities and solenoids. The components will be aligned vertically by adjusting the height of the canoe spheres. The PXIE resonators (as seen in figure 15), unlike those in the AIU, are in a horizontal orientation that reduces the magnitude of the vertical thermal shift at the beam axis; however, compensation for vertical shift must be applied. The design takes advantage of vacuum forces that were troublesome in the AIU, utilizing them to pre-load the kinematic couples during warm alignment. Optical measurement with open-wire targets will again be employed for measurement of the thermal shift for individual components; however, the LDS measurement system now under development will be tested in this cryomodule to quantify overall thermal shift of the strong-back assembly. Significant improvement in alignment quality and control of thermal shift is expected over the Kelvin arrangement utilized in the AIU cryomodule.
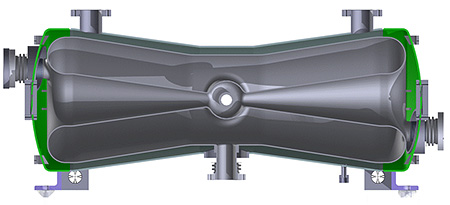
Figure 15. Cut-away section of a PXIE SRF cavity showing kinematic V-groove elements and optical wire targets
Conclusion
As SC accelerator technology evolves, accurately characterizing and controlling thermal shifts in these devices is becoming more important. Techniques to minimize or cancel out this motion, to reduce uncertainty in corrections and to develop better methods of acquiring thermal shift measurements are key to keeping this technology moving forward. It is hoped that the methods and ideas presented in this article will contribute to the advancement of SC accelerator technology, and perhaps be applied in other fields of industry and science.
Acknowledgements
The extraordinary complexity of SC accelerator systems necessitates teamwork on a deep level, indicated by the number of co-authors of this paper. Many thanks for the outstanding effort of all who contributed to the work presented here, especially to Quentin Hasse and Denise Skiadopoulos at the APS and to Glenn Cherry at ATLAS.
The image in figure 11 appears courtesy of Bal-tec, a division of Micro Surface Engineering Inc., Los Angeles, California.
This research used resources of the Advanced Photon Source, a U.S Department of Energy (DOE) Office of Science User Facility operated for the DOE Office of Science by Argonne National Laboratory under contract number DE-AC02-06CH11357.
References
1 Tretkoff, E., Ouellette, J., and Chodos, A., “April 1911: Onnes Begins Work on Superconductivity,” “This Month in Physics History,” American Physical Society (APS) News, Vol. 16, No. 4, 2007.
2 Jansma, W., "An Improvised Two-Dimensional Laser Surface Scanner for Diagnosis of RF Thermionic Electron Gun Problems," Journal of the CMSC, Vol. 7, No. 1, Spring 2012.
3 High Energy Accelerator Research Organization (KEK), Japan, “ILC S-1 Global Report,” Section 14, pp. 133–143, March, 2013.
4 Smith, W. J., Modern Optical Engineering: The Design of Optical Systems, Second Edition, pp. 96–99, McGraw-Hill, 1990.
5 Ivanyushenkov, Y., “Advances in Superconducting Undulators,” 2013 Particle Accelerator Conference (PAC2013) Conference Proceedings, Pasadena, California, September 29–October 4, 2013.
6 Harkay, K., et al., “APS-U Superconducting Undulator Physics Requirements Document,” Technical Report APS_1425203, 2011.
7 Penicka, J. M., Doose, C., Harkay, K., Hasse, Q., Jansma, W., Ivanyushenkov, Y., Kasa, M., Skiadopoulos, D., Trakhtenberg, E. M., and Wesling, S., “Alignment of Superconducting Undulators at the APS”, 13th International Workshop on Accelerator Alignment, IHEP, Beijing, China, October 13–17, 2014.
8 Ostroumov, P., “Advances in High Power Compact Accelerators,” U.S. Department of Energy Nuclear Physics Highlights, April, 2014.
9 Slocum, A., “Kinematic Couplings: A Review of Design Principles and Applications,” International Journal of Machine Tools and Manufacture 50.4, pp. 310–327, 2010 (MIT Open Access Article; Terms of Use: Creative Commons Attribution-Noncommercial-Share Alike 3.0; Detailed Terms: http://creativecommons.org/licenses/by-nc-sa/3.0/).
10 Kim, S. H., Conway, Z. A., Jansma, W., Kedzie, M. J., Kelly, M. P., and Ostroumov, P. N., “4K Alignment of Superconducting Quarter-Wave Cavities and 9T Solenoids in the ATLAS Intensity Upgrade Cryomodule,” 27th Linear Accelerator Conference, Geneva, Switzerland, August 31–September 5, 2014.
Add new comment